










全自动码垛机器人的构造特点有哪些?
来源:本站时间:2019/8/12 10:03:45
1、进袋机构。采用皮带输送机完成码垛机供袋任务。
2、转向机构。按设定程序对包装袋作转向编排。
3、排袋机构。采用皮带输送机将编排好的包装袋送*积袋机构。
4、积袋机构。采用皮带输送机集中编排好的包装袋。
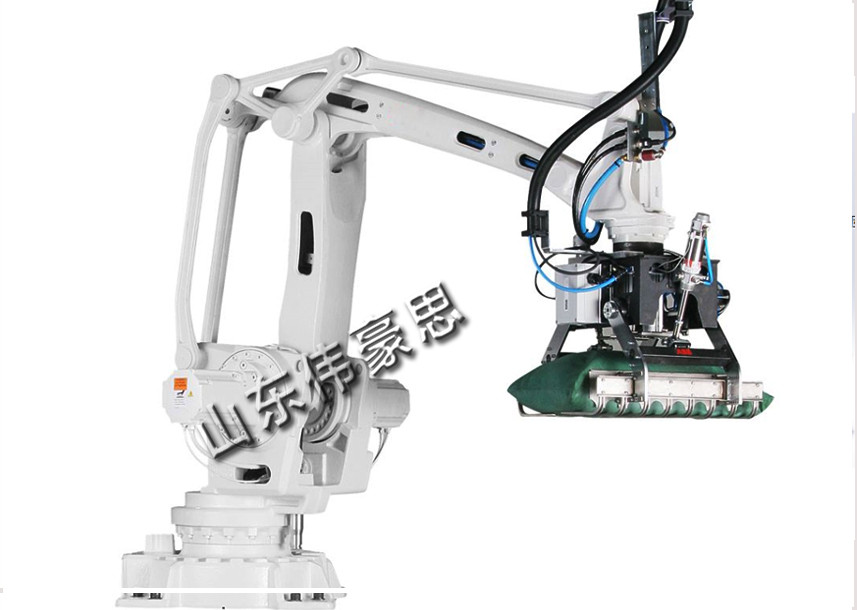
5、抓袋码垛机构。采用机器人码垛机构完成码垛作业。
6、托盘库。成叠的托盘由叉车送人,按程序逐个排放*托盘辊道输送机,有规律地向码垛工序供应空托盘,达到8层后的成垛托盘,由辊道输送机输送*成垛托盘库,*后由叉车取出送*仓库贮存,系统采用可编程序控制器(PLC)控制。
全自动码垛机器人主要由机械主体、伺服驱动系统、手臂机构、末端执行器(抓手)、末端执行器调节机构以及检测机构组成,按不同的物料包装、堆垛顺序、层数等要求进行参数设置,实现不同类型包装物料的码垛作业。按功能划分为进袋、转向、排袋、编组、抓袋码垛、托盘库、托盘输送以及相应的控制系统等机构组成。