










熟石灰全自动码垛机的应用领域
来源:本站时间:2021/1/29 13:55:55
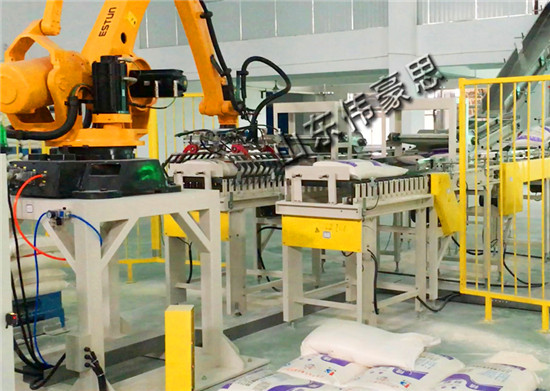
熟石灰全自动码垛机主要由机械主体、伺服驱动系统、手臂机构、末端执行器(抓手)、末端执行器调节机构以及检测机构组成,按不同的物料包装、堆垛顺序、层数等要求进行参数设置,实现不同类型包装物料的码垛作业。
熟石灰全自动码垛机根据机器人在完成码垛作业时其与传送带及托盘的位置关系,综合考虑运动过程障碍物情况,选用“门”字形运动轨迹。注意到机器人末端执行器在完成托盘上不同位置纸箱的码放时,所走轨迹均为“门”字形,仅因物料在托盘上位置不同导致轨迹起始点坐标不同。
在采用熟石灰全自动码垛机进行码垛作业的时候,机器人抓手的选择很重要,真空抓手便宜,易于操作,而且能够装载大部分负载物。翻盖式抓手,它能将一个袋子或者其他包装形式的两边夹住;叉子式抓手,它插入包装的底部来将包装提升起来;袋子式抓手,这是翻盖式和叉子式抓手的混合体,它的叉子部分能包裹住包装的底部和两边。
熟石灰全自动码垛机应用的领域包含了:食品饮料类、医药类、烟草类、化工类、物流类、家电类、塑胶类等行业。可以通过更换抓手,实现在不同行业各种形状的成品进行装箱和拆(码)垛作业。灵活应变现场的各种码垛要求,适应多种包装形式,包括:纸箱自动化码垛、袋包自动化码垛、桶装物品码垛、异型包装码垛。
上一条:化工粉智能吨袋拆包机的设备优势
下一条:稀土全自动包装码垛设备构成